 Хорошая вещь для подрастающих видеостокеров
Хорошая вещь для подрастающих видеостокеров. Чтобы с детства привыкали с продвинутым технологиям съемки.
http://detskie-kuhni.ru/basefiles/artechW9.jpg[/img]
Вот здесь видео.
PS Если честно, то и сам бы с удовольствием с этой шткой поиграл

Oleg2d писал(а):
Павел, Александр, спасибо! Посоветуйте пожалуйста ещё раз.
Беру:
1.
DJI Phantom 2 + H3-2D Gimbal +EXTRA 2 Pair Free Props2.
Video AV Audio Video Transmitter Receiver Sender FPV 2.0Km Range3.
2 Pairs Self-Tightening Propeller For DJI Phantom 24.
Propeller Balancer Max Load 300g В основном все по Пашиным ссылкам

Что я забыл или чего ещё из расходников, батарей или инструментов может быть, сразу докупить, что бы потом "в лавку не бегать"?
Paha_L писал(а):
отвертка 6-гранная, чтобы фантом разбирать.
osd. у меня простая - выводить на монитор только напряжение, чтобы не прозевать посадку, это очень важно. есть сложные, выводят высоту, скорость и тд, это скорее для понтов, и будут отвлекать во время полета.
таким балансиром все равно самозатяги особо не отбалансируешь )
фантом 2 отличается только размером батарейного отсека, кнопкой включения, отсутствием ломающихся проводов батарейки, невозможностью подключить обычные батарейки и всё. но я за длительностью полета не гонюсь, замучаешься потом ретушеру огромные файлы пересылать.
на первом фантоме при покупке даталинка тоже можно ходить по точкам, только для чего это нужно, я пока не придумал, потому и не покупаю даталинк. на винде кстати тоже можно, не только на айпаде.
к пульту креплю на суперклее такой мониторчик 4.3" High Resolution Car Color TFT LCD Camera Monitor
у меня 6 батареек с imax b6 зарядкой для одновременной зарядки. только к ней нужен мощный блок питания.
подшипники можно взять для моторов, но свои подшипники я не смог снять, поэтому просто фольгу подложил, когда зашатались.
еще нужна крутилка для угла наклона камеры, сзади пульта вставляется, я ее сделал из палочки чупа-чупса.
надежный ремешок вешать пульт на шею.
еще люди покупают чемоданы за сотни баксов, но я просто на плече ношу.
батарейка нужна для питания приемника и монитора, можно фантомовскую, у меня 8 пальчиков в коробочке.
еще неплохо иметь маленький gps трекер. я купил Minimum micro A GPS tracker locator burglar Monitor CX-01, оказалась обманка неработающая.
еще написать свой телефон на коптере, чтобы люди добрые вернули, когда коптер домой в китай полетит.
если коптер всё время держать к себе зопой и осматривать место перед стартом на наличие проводов, то можно сразу без тренажера летать по-немногу. лучше сначала над травкой или снегом летать, а не над водой, асфальтом, вулканом и тд.
можно купить защиту для винтов, но это на любителя, тем более самозатяги наверно не влезут в стандартную защиту.
Paha_L писал(а):
Embosser писал(а):
OSD типа такого?
http://www.ebay.com/itm/F05237-Tarot-ZY ... 3f2530208aЕще один момент не понял: FPV передатчик и OSD на борту имеют свое питание или от основной батареи питаются?
А крепятся они куда и как? Я так понимаю внутри место вряд ли есть.
Еще пара вопросов возникла: я так понял, что наклон камеры регулируется с пульта. Для этого надо докупать плату какую-то еще? Или на мозгах Naza уже все есть для этого? И не совсем понятно с OSD: мне понравилась iOSD mini, но вроде к ней еще надо Naza PMU V2. Или в новых версиях уже не надо?
да. у меня такой osd. питаются от основной батареи. висят сбоку на проводах и скотче у меня. fpv еще и проветриваться должен. они маленькие. как полторы зажигалки.
наклон с пульта. больше плат не надо. к моей osd ничего не надо. про другие не знаю.
Embosser писал(а):
Павел, а какие батарейки брал дополнительно? Я смотрю они от каких-то подозрительных Elebar 2500 за 750 рублей до Turnigy 2200 за 1000 рублей, есть и более дорогие.
Upd вру, даже за 500 рублей есть. Какие то без имени, в описании написано Turnigy.
Paha_L писал(а):
брал zippy compact 2200 25с , послабее немного фантомовских особенно в мороз, но в пересчете на цену лучше.
брал 3000mAh inix - держит как фантомовские, раздуваться начала через полгода.
4000mAh - процентов на 20 только дольше летает
http://www.ebay.com/itm/150996666911?ss ... 1439.l2649 наклейка на дешевом принтере распечатана. раздуваться начала через полгода.
но это все только для первого фантома подходит.
http://www.ebay.com/sch/i.html?_odkw=11 ... sacat=2562Полезный
сайт про мультикоптерыAbricos писал(а):
Кстати!
Полезная вещичка для любителей полетать -
http://www.parkflyer.ru/blogs/view_entry/4589/Ссылка на плагин к google earth с полётными зонами в РФ -
must have!Abricos писал(а):
Владельцам Фантомов может будет полезно. Я перед тем как заняться строительством провел несколько месяцев на специализированных форумах. Выяснял слабые и сильные стороны коптеров разных схем и много читал про полетные контроллеры. Давным давно тоже хотел купить Фантома, но потом передумал. Нет, он неплохой аппаратик и справляется со своими задачами, просто для моих целей он не подходит.
Первое: Низкая грузоподъемность.
Второе: Хотя может и первое. При отказе одного из движков или "отстреле" лопасти пропеллера, любой квадрокоптер почти камнем летит вниз. Летая в городе могут быть серьезные последствия. По этой причине схема КВАДРО (с четырьмя моторками) сразу попала под табу.
6-ти моторные схемы позволяют безопасно долететь и посадить коптер на 4 моторах, а 8-ми моторные на 6 моторах, бывали случаи когда народ их безопасно сажал даже на 4-х моторах, но там уже нужна доля удачи.
Полетный контроллер NAZA это и сильная и слабая сторона одновременно. Сильная в том смысле, что "достал и полетел", настроек почти самый минимум. И вот именно количество настроек является слабой стороной. Контроллер универсальный, его ставят почти на все виды леталок и ездилок, а количество настроек не позволяет точно настроить под тот тип аппарата на котором он стоит. Но надо отдать должное китайцам, они смогли сделать контроллер который "в среднем" неплохо себя ведет на большинстве аппаратов.
Теперь самое главное, что хотел сказать. Не видитесь на рекламный слоган DJI, "распаковал и полетел". Фантом прошел предварительную настройку и калибровку на заводе и в большинстве случаев это позволяет на нем сносно летать сразу, но в определенный момент получим "улетел на родину". Тот же магнитный компас был откалиброван на долготе и широте завода. В других точках полета будет другое магнитное склонение и его надо учитывать. Иначе полетный контроллер получает от GPS одни значения, от компаса другие. Вы щелкаете тумблер - возврат домой, а полетный контроллер еще не смог высчитать разницу в показаниях датчиков, вот он и летит куда угодно, но не домой. Вполне возможно, что именно это и произошло с фантомом у
Oleg2d, с момента взлета прошло очень мало времени, разница еще не была высчитана, тут же надо было еще обрабатывать кучу информации приходящей с акселерометров (Олег говорил, что был сильный ветер), тут приходит сигнал "давай домой" вот и глюкнул ПК (не хватило мощности для обработки всех данных), что и привело к краху.
Оптимальный вариант откалибровать компас в месте полетов. Если отъедите на 200-300 км, то лучше данную процедуру повторить. В крайнем случае, не сразу взлетайте когда увидели, что фантом "дал зеленый свет на взлет", дайте ему еще пару минут, привести показания GPS и магнитного компаса к единому значению, а только потом взлетайте (но это не 100% гарантия, лучше откалибровать).
Еще одно. Поставили подвес и заметили, что после взлета его несет вперед на пару метров. Откалибруйте акселерометры после установки подвеса.
Но вы все правы, у фантомов есть три неоспоримых преимущества:
1) Низкий уровень капиталовложений до получения первого результата. Тут ему конкуренцию может составить только Волькерия.
2) Компактность.
3) Игрушечность. Это пожалуй самое лучшее преимущество. Всегда можно прикинуться "дурачком" со словами, "а, что?! у вас тут нельзя играть?!"
Фух! Хорошо, что данная тема здесь есть.
Abricos писал(а):
Embosser писал(а):
Смотрю в сторону Tarot F690Y. Думаю самое то в качестве основной съемочной машинки. Еще и складной.
Честно сказать F690
Y я не видел, а вот F690
S хорошая рама. Если правильно подобрать винто-моторную группу, то будет таскать зеркалку минуть 15-20.
Embosser писал(а):
Abricos, а как Ардупайлот по стабильности висения? У него так же если ручки бросить, он зависает на месте?
В последних прошивках в режимах удержания высоты или позиции висит как "прибитый гвоздями". У него много полетных режимов. Есть режим когда, да, зависает и ждет дальнейших команд.
У него, на данный момент, 12 полетных режимов (переключаются с пульта или с наземной станции). Это удержание высоты, стабилизация, акробатический режим, режим спорт (носится как ужаленный), удержание позиции, движение по кругу вокруг заданной точки, возврат домой, посадка, ...
В Ардупилоте есть очень интересные функции. Например он учитывает влияние собственных магнитных помех. Силовые провода, которые идут от батареи к распределительной плате и от распределительной платы к контроллерам двигателей создают очень сильные электромагнитные помехи (это происходит у всех коптеров). Если посмотреть то на моем фото компас стоит выше GPS антенны на максимальном удалении от силовых проводов. У фантомов тоже компас вынесен на одну из ножек подальше от силовых проводов. Создаваемые помехи можно сильно уменьшить просто скрутив между собой плюсовые и минусовые провода, как компьютерная витая пара, в итоге они будут немного сами себя компенсировать. Так вот в ардупилоте можно откалибровать этот момент. Т.е. он замеряет силу помех при различных силах тока протекающих через провода и потом в полете уже учитывает эти помехи. У него есть автотриммирование, автоматическая настройка P.I.D. регуляторов и т.д. Все вот эти настройки, подстройки, регулировки очень сильно улучшают стабильность полетов и управляемость. Если совсем лениво этим заниматься (хотя все это занимает от силы минут 20-30 и делается один раз после смены прошивки), то можно вообще воспользоваться режимом самообучения. Т.е. запускаете с настройками по умолчанию, он сам несколько минут летает (летает это сильно сказано, перемещается в радиусе метра), а потом радостно сообщает, что готов. При первых двух, трех полетах он потом себя еще немного подстраивает и все готово, все откалибровано и настроено.
Как то получается, что я тут агитирую за Ардупилота. Надо с них денег попросить
На самом деле получился очень хороший контроллер именно для фото- видео- съемки, особенно если учесть его стоимость.
Abricos писал(а):
Embosser писал(а):
Насчет Ардупайлота надо изучить тему, спасибо.
Вот хорошая тема про него:
http://forum.rcdesign.ru/f123/thread233564.htmlЛучше конечно прочитать все 2хх страниц. Понимаю, что тяжело, так как сам их прочитал (тогда их было меньше, а остальные читать легче).
Abricos писал(а):
Konstantin Sutyagin писал(а):
Сколько надо готовить бабок для коптера на ардупилоте?
На этот вопрос тяжело ответить. Готовых "фабричных" комплектов на Ардупилоте я не видел, а то, что продают в готовом виде, это комплекты собранные энтузиастами, хотя среди них есть очень именитые мастера, но цены на готовые комплекты просто запредельные. Если собирать все самому, то выйдет раза в три-четыре дешевле. В большинстве случаев потребуется только отвертка. Паяльник нужен если есть желание улучшить, удешевить и облегчить.
Гексакоптер (6-ти моторный) способный носить зеркалку можно собрать уложившись в 1000 долларей, но это будет прям в притык (для ГоуПрошки хватит 600 долларов), а так 1500-3000 долларов будет очень хороший агрегат. Еще 500-800 долларов хороший подвес для камеры. Можно в подвес вбухать и 1500, и 2000 долларов, но это уже перебор. У меня на данный момент затраты приближаются к 5000 долларов, но я это отдельный разговор. Тут сошлось воедино несколько желаний, хотелок и перемешалось с хобби, а на хотелки и хобби деньги тратятся в лет. Сейчас я собираю три рамы (мелкий, средний и тяжеловес) на них 70-80% всего уже куплено. Контроллеры куплены на все, моторы куплены на среднего. Сейчас много экспериментирую и покупаю по одному мотору с разными характеристиками (по этому сумма получилась уже большая, каждый мотор это 20-70 долларов). Из готовых леталок, тот, что на фото, но это не боевой агрегат, а учебно-экспериментальный на нем я отрабатываю то, что потом пойдет на боевые леталки. Тот, что на фото, легко поднимает 6 кг груза при собственном весе чуть меньше 3 кг (пришлось искусственно утяжелять иначе невозможно было его посадить). Летает примерно минут 20-25 на двух 5Ач аккумуляторах (не могу сказать точно, не летал до срабатывания пищалок, так как экспериментальные полеты сильно отличаются от обычных).
Konstantin Sutyagin писал(а):
Какой вес (какие камеры) может поднимать такой коптер? Если фантик терпит крушение, то в общем гоупро может выжить, и даже если все потеряется то камеру за 300-400 не так обидно потерять, как фотик за 1000 и больше.
Поднимаемый вес напрямую зависит от вложенной суммы денег (если они правильно вложены). 4-5 кг можно бюджетно уложиться, 10-15 в разумные суммы, дальше предела нет.
А насчет падений. У вертолетчиков есть поговорка: "Кто думает о краше, обязательно упадет." Падение вполне вероятно, но можно предпринять меры для уменьшения риска падения.
Использовать более крашеустойчивые леталки, например не 4 мотора, а 6-8. Контроллеры моторов брать не на 20 ампер при пиковом потреблении мотором 15-16 ампер, а с большим запасом, например на 30 ампер и с кварцем, а не с LC цепочкой в генераторе. Ставить два аккумулятора. Настроить, что делать коптеру при потере сигнала. Полетать на симуляторе...
Мы же когда покупаем машину не думаем, что завтра попадем в аварию. Да и, обычно, перед покупкой посещаем автошколу.

Abricos писал(а):
Oleg2d писал(а):
Не пойму зачем зеркалку на коптер, только из за менее широкой оптики, но существующие подвесы вряд ли потянут даже полтинник без вибрации - я так думаю. Есть же м-ка у кэнона и легкие панасоники с блинчиками и нексы, если хочется чуть получше чем проха и не такое это все тяжелое как зеркалки и стоит сравнимо с гоупро (1я м-ка и панасоники устаревших моделей
Сильно ошибаетесь! Народ REDы на подвесы ставит, а уж для зеркалок столько подвесов наделали - глаза разбегаются. И ни каких вибраций. Правда борьба с вибрациями камеры на подвесе начинается далеко до подвеса. Основной источник вибрации - винто-моторная группа. Вот с нее надо начинать. Сначала делаем балансировка каждого мотора в отдельности. На заводах балансируют только дорогие моторки, но даже их надо балансировать. У них поток, укладывается в нормы, в коробку. У нас нет норм, нам нужен идеал, вот и балансируем. Обязательна балансировка пропеллеров, причем все балансируют лопасти, но никто не балансирует втулку, а это очень сильный источник вибраций. Если есть возможность и смелость, то потом балансируем связку мотор-пропеллер.
Второй источник - это оператор, ну тут уже только опыт и часы налета все исправят. Чем плавнее работает оператор, тем меньше работы подвесу.
Третий источник - это воздух, точнее окружающая среда и то, что называют погодой. С порывами ветра достаточно хорошо справляется сам коптер и потом "дорабатывает" подвес Причем тут действует простое правило, чем тяжелее и энерговооруженнее коптер, тем легче ему противостоять порывам ветра.
Есть несколько небольших правил и хитростей, которые позволяют еще уменьшить и без того почти отсутствующие вибрации.
Правильный подбор демпфирующих элементов через которые подвес крепится к коптеру. Те самые резиновые "бобышки". Они выпускаются разной жесткости и рассчитаны на разный вес. Необходимы правильные элементы. Берем общий вес камеры с подвесом, делим на количество используемых "бобышек" и получаем нужный результат. Самые распространенные рассчитаны на вес 50, 100, 200 и 300 грамм. Бывают и другие, но их труднее найти.
Стяжка тонким тросиком кончиков всех лучей позволяет почти на порядок уменьшить уровень вибрации.
Есть еще целая куча хитростей и тонкостей. Правильный материал и толщина луча, способ крепления лучей, материал и толщина крепежных площадок и т.д.
Вообще это такое дело - оно как пылесос затягивает деньги и время (тоже читай деньги)
Но зато правильно собранный, отрегулированный и настроенный коптер приносит неимоверное удовлетворение результатами и помогает вернуть эти самые, потраченные деньги.
Abricos писал(а):
Несколько человек спросили конфигурацию той моей рамы, что на фото и ссылки, что где купить.
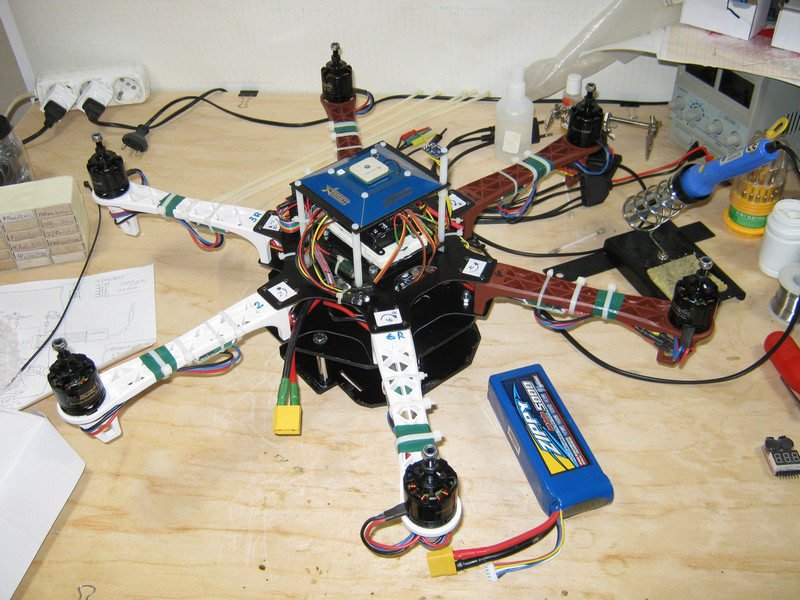
Предупреждаю еще раз, это экспериментальная рама, для проведения различных тестов. Что бы эта конфигурация стала нормально летать надо заменить моторы на менее мощные.
Вот:
Рама (1 шт) 550 -
http://bit.ly/1ih8sRjМоторы (7 шт, один запасной) HP2814-810Kv -
http://bit.ly/1hjxjJ2Моторы можно заменить например вот на эти -
http://bit.ly/1fTyxc5не смотря на то, что они недорогие, многие с них начинают и получают хорошие результаты, да и недорого получается их потом заменить на более подходящие, когда придет понимание того, что хотите иметь.
Регуляторы моторов (6+2 шт, два запасных, но за один раз заказать можно не больше шести) - Afro ESC 30Amp Multi-rotor (SimonK Firmware) (Прошивки от SimonK считаются лучшими для мултикоптеров) -
http://bit.ly/1ek7rqSПрошивалка для ESC (для смены прошивки регуляторов) -
http://bit.ly/1oFc2h1Пропеллеры:
Пластик (дешевые тренировочные) (4-5 комплектов, надо заказывать несколько комплектов, пусть лучше пара пропов останется, чем ждать месяц пока приедут новые) -
http://bit.ly/1fTyKMCКарбон (полетные) (5 комплектов) -
http://bit.ly/1kAVpx4Под комплектами имелось ввиду их комплект в магазине, пластиковые по 2+2, карбоновые 1+1. А так для учебы достаточно иметь один полетный и 1-2 полных запасных комплекта, а для полетов 1 полный и по паре запасных пропеллеров каждого направления вращения, но запас, он не помешает.
Пластиковые дают меньшие вибрации и чуть большую тягу, но летать на них с грузом не советую, они не очень высокого качества и могут отстреливать лопасти в полете (у меня отстрелов не было, но многие это писали).
А тренироваться на карбонах - дорого, но главное опасно. Первое время пару раз подрывался схватить рукой при падениях, но вовремя одумывался. Пластиковые пропеллеры пробивают кожу и ломаются, а карбон легко отрубает пальцы (пропы большего диаметра могут и кисть отрубить), всегда надо соблюдать меры предосторожности.
Полетный контроллер (1 шт) APM 2.5 + OSD + GPS + модемы телеметрии + датчик тока -
http://bit.ly/1ih99KFИ по-отдельности
Полетный контроллер (1 шт) APM 2.5 -
http://bit.ly/1e4Si1YДатчик GPS (1 шт):
Подешевле -
http://bit.ly/1jmNTGLПодороже и поточнее -
http://bit.ly/1jmNUdEМодемы телеметрии приемник + передатчик 915 Мгц (1 компл.) -
http://bit.ly/1jSue2fПлата OSD (подмешивание данных телеметрии в видеосигнал) (1 шт) -
http://bit.ly/1fTzp0qКорпус для полетного контроллера (1 шт) -
http://bit.ly/1jmNSm8Магнитный компас (1 шт) -
http://bit.ly/1fTzAsGНейлоновые стойки (1 компл.) -
http://bit.ly/1hjxXpWНейлоновые стойки (1 компл.) -
http://bit.ly/PCDdJSНейлоновые стойки (1 компл.) -
http://bit.ly/1gB3uOeНейлоновые стойки (1 компл.) -
http://bit.ly/1jSuw9pНейлоновые стойки (1 компл.) -
http://bit.ly/1hw0G53Нейлоновые стойки (1 компл.) -
http://bit.ly/1oFcuMfНейлоновые гайки (1 компл.) -
http://bit.ly/1hRywWKНейлоновые винты (2 компл.) -
http://bit.ly/1inrI14Стабилизатор 5В (2 шт один для контроллера, один для модемов телеметрии и OSD) -
http://bit.ly/1ihb55PЗачем для модемов отдельный стабилизатор? Модемы и OSD достаточно мощные потребители причем работающие с переменным потреблением и создают помехи по питанию. Плохо если из-за экономии нескольких долларов просядет напряжение питания полетного контроллера и он даст сбой. Вероятность конечно маленькая, но она потенциально существует. Это правило применимо не только к Ардупилотам, но и ко всем коптерам. Питание главных мозгов всегда лучше делать отдельно.
Стабилизатор 7,2-12В (2 шт, для видеопередатчика и курсовой камеры, если их напряжения питания совпадают, то достаточно одного стабилизатора) -
http://bit.ly/1ins4EGПлата распределения питания (1 шт) -
http://bit.ly/1mTqdxlБарарея 5000/4S (2 Шт) (батарей много не бывает, лучше иметь запас) -
http://bit.ly/1jSvan3Барарея 5000/3S (2 Шт) -
http://bit.ly/1ek8FCdВообще вариант с 3S для легких коптеров более предпочтителен, но если Ваш видеопередатчик не может работать от 7-9 вольт, то придется покупать именно 4S.
Конверт для хранения/зарядки аккумуляторов (по количеству батарей) -
http://bit.ly/1lEZ9yPПищалка индикатор разряда батареи (2 шт) -
http://bit.ly/1ihbEwwПоисковая пищалка (1 шт) -
http://bit.ly/1e3HDUQВнешний конденсатор (1 шт) -
http://bit.ly/1qdt57mРемни для крепления батарей (1 компл.) -
http://bit.ly/1mTqoIIЭлектрический разъем XT60 (по количеству батарей + пара запасных) -
http://bit.ly/1lEZeTkНо лучше вот эти:
Электрический разъем XT90 (по количеству батарей + пара запасных) -
http://bit.ly/1jSvySKЭлектрический разъем EC5 (по количеству батарей + пара запасных) -
http://bit.ly/1ihc8CJПровод в силиконовой изоляции 10AWG (1 метр, красный) -
http://bit.ly/1jSvFxrПровод в силиконовой изоляции 10AWG (1 метр, черный) -
http://bit.ly/OoLvDRПровод в силиконовой изоляции 14AWG (5 метров, красный) -
http://bit.ly/1qaO6h8Провод в силиконовой изоляции 14AWG (5 метров, черный) -
http://bit.ly/1lJySlFПровод в силиконовой изоляции 14AWG (5 метров, синий) -
http://bit.ly/1hjz6xSПровод в силиконовой изоляции 24AWG (5 метров, красный) -
http://bit.ly/1lJyXphПровод в силиконовой изоляции 24AWG (5 метров, черный) -
http://bit.ly/1qdtjexПровод в силиконовой изоляции 24AWG (5 метров, желтый) -
http://bit.ly/1mRjhxHКомплект одиночных проводов мама-мама для межблочных соединений (2 компл.) -
http://bit.ly/PCEZugКомплект тройных проводов мама-мама для межблочных соединений (2 компл.) -
http://bit.ly/1qaOufBТермоусадочная трубка 4мм (1 метр черная) -
http://bit.ly/1hjzhJHТермоусадочная трубка 4мм (1 метр красная) -
http://bit.ly/PCF8xRТермоусадочная трубка 6мм (1 метр черная) -
http://bit.ly/1qdtlTJТермоусадочная трубка 6мм (1 метр красная) -
http://bit.ly/1spVRDBТермоусадочная трубка 10мм (1 метр черная) -
http://bit.ly/1mTqArrТермоусадочная трубка 10мм (1 метр красная) -
http://bit.ly/1int1NkЗарядное устройство (1 шт) -
http://bit.ly/1e4VNFFБлок питания к зарядному устройству (1 шт) -
http://bit.ly/1lEZwtqЛучше вот этот вариант (заряжаем одновременно не одну батарейку и больше возможностей по управлению зарядом/разрядом):
Зарядное -
http://bit.ly/1spWc9zБлок питания -
http://bit.ly/PO8AAOВольтметр/балансир (1 шт) -
http://bit.ly/1e3Io0pПульт радиоуправления с приемником (1 шт) -
http://bit.ly/1qaPiAWБатарея для пульта радиоуправления (1 шт) -
http://bit.ly/1jSwJByЕсли есть средства то лучше сразу купить более дорогую аппу -
http://bit.ly/1h5mEAEИ приемник к аппаратуре радиоуправления -
http://bit.ly/1spWsFuНо, на самом деле, более дорогую аппу можно прикупить позже, а более дешевую, потом использовать для управления подвесом в режиме работы пилот-оператор.
Антивибрационная подложка под полетный контроллер (1 шт) -
http://bit.ly/1oFdZu0Демпфирующие элементы под плату полетного контроллера (1 компл.) -
http://bit.ly/1hjzTPmПластиковые стяжки -
http://bit.ly/1hRB0VfТак же есть, но не установлены:
Ноги с держателями батареи, видеопередатчика и креплением для подвеса (1 компл.) -
http://bit.ly/1fZ6ftgДополнительный держатель для батареи (1 шт) -
http://bit.ly/1mTqJevКомплект видеопередатчик + видеоприемник (1 компл.) -
http://bit.ly/1lEZDoMЕще потребуются:
Измерительный прибор (мультиметр)
Кусачки
Паяльник
Припой
Отвертки (лучше универсальный набор так как нужны крестообразные, шестигранники, звездочки.
Изолента
Двухсторонний скотч
Большой удобный стол
Кабель microUSB для заливки прошивок, программирования и чтения лог-файлов.
Компьютер для заливки прошивок, настройки и запуска программы наземной станции (лучше ноутбук, что бы можно было "носить в поле").
Желание
Наверняка, что то забыл, но этого комплекта уже точно хватит.
Еще могут пригодится:
GPS навигатор для поиска коптера в случае падения.
Универсальный Ватт-метр с сервотестером для настройки, а так же балансировки моторов -
http://bit.ly/1lEZH83FtdiUSB программатор для программирования платы OSD
USBisp программатор для смены прошивок в пульте управления -
http://bit.ly/QUIeOIВроде много написал и кажется, что все очень сложно, но на самом деле, имея все это, коптер собирается всего за один вечер. Самая большая сложность это составить вот такой список, обидно когда выясняется, что чего то не хватает и надо ждать месяц.
И еще! Когда делаете заказ на Хоббикинге, то батареи заказывайте отдельно от всего остального.
Батареи надо заказывать доставкой экспресс службой LiPo (иначе не приедут, а вернутся в магазин).
Все остальное лучше заказывать обычной почтой с треком (приезжает быстрее, чем экспресс, а стоит намного дешевле, парадокс).
И еще одно замечание по заказу. Не все бывает в наличии сейчас. Некоторые позиции могут находиться в "бекордере". Так вот тогда делаем два заказа. То, что есть сейчас заказываем и оплачиваем, потом делаем второй заказ с позициями которые находятся в бекордере и его тоже оплачиваем.
Теперь, все, что есть сейчас высылают сразу в первом заказе, а то, что находится в бекордере, автоматически ставится в резерв за вами и когда все приедет, то высылают второй заказ.
в тему БАРАХОЛКА ВИДЕОЛЁТЫ















{kind=link}